Übersicht
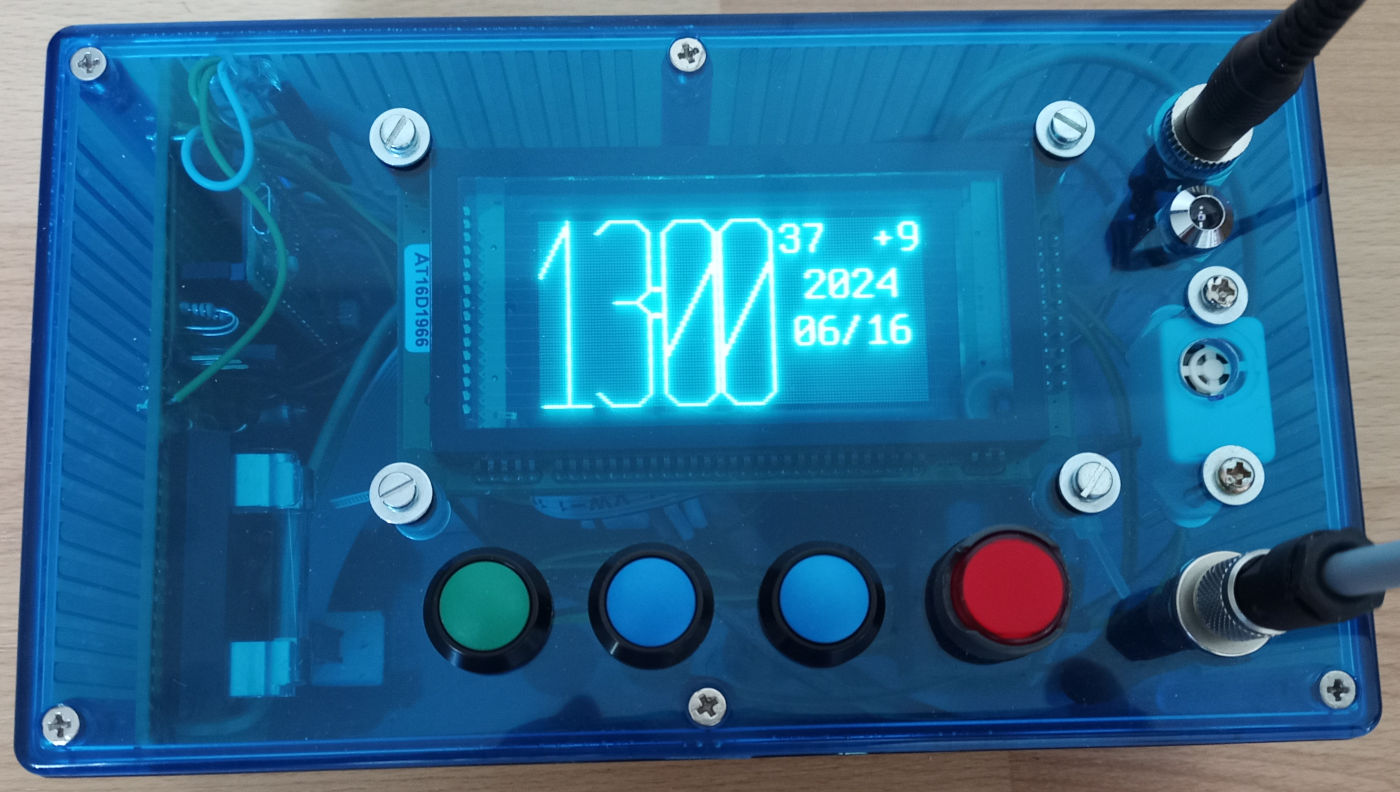
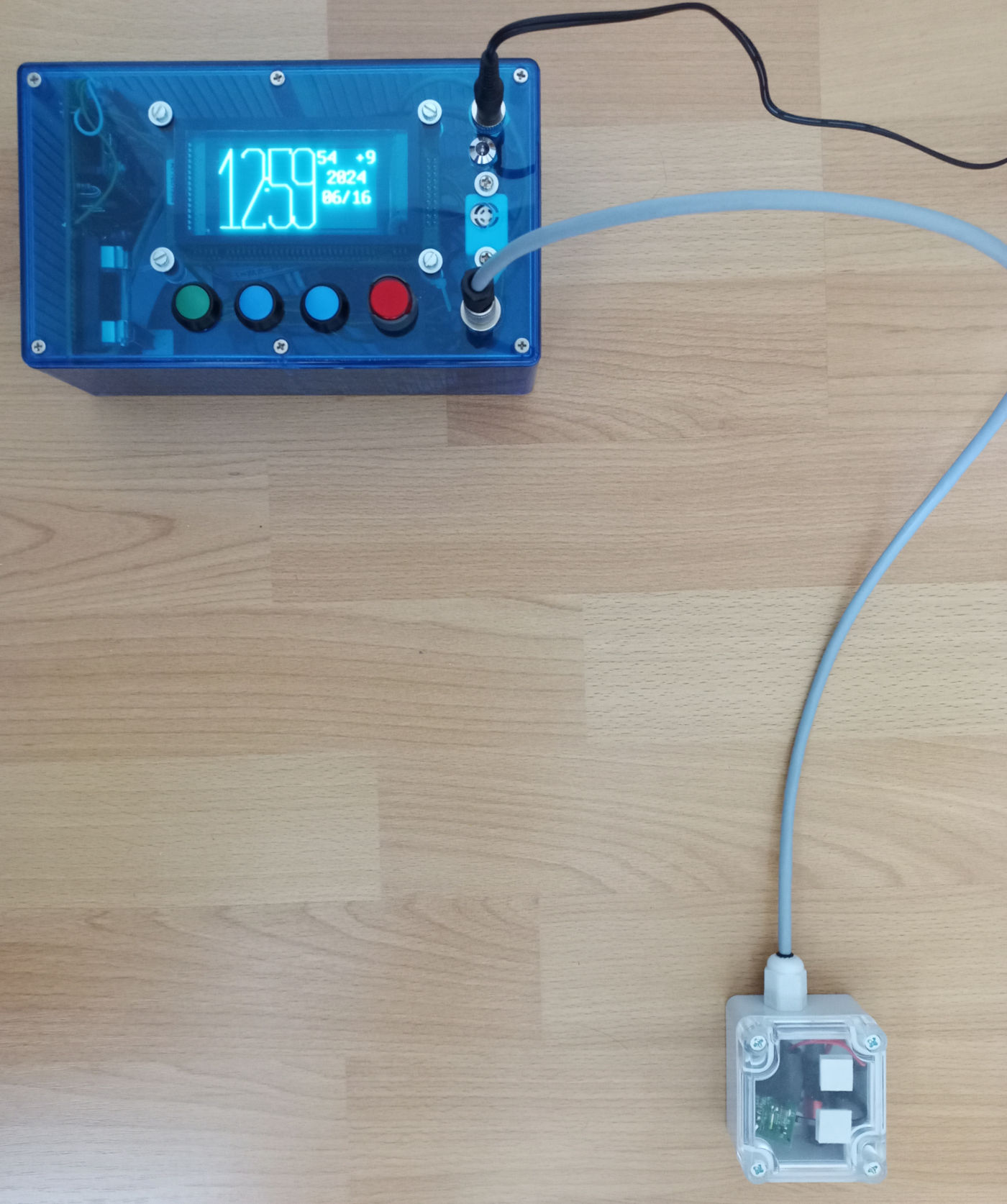
Die Ma_Sys.ma DCF77 VFD Raspi Clock ist eine selbst gebaute Digitalfunkuhr auf Basis eines Vakuum-Floureszenzdisplays, welche durch einen Raspberry Pi Pico (RP2040 Mikrocontroller) angesteuert wird und ihre Uhrzeit mittels eines DCF77-Antennenmoduls empfängt.
Designziel der Uhr war es, möglichst viel Fehlerkorrektur bei der Auswertung der DCF77-Signale einzubauen, sodass eine Uhrzeitsynchronisation trotz billiger Antenne auch bei schlechten Empfangsbedingungen möglich ist. Weiterhin ist der DCF77-Empfang kontinuierlich aktiv, sodass der Wechsel der Sekunden in der Anzeige mit dem Empfang der Signalpulse synchron erfolgt.
Repository-Inhaltsübersicht
bo-dcf77/
|
+-- dcf77_vfd_raspi_clock_att/ -- Ressourcendateien zur Webseite
|
+-- doc_bitlayer_statechart/ -- Zustandsdiagramm für den Bitlayer
| passend zum Code: dcf77_bitlayer.ads
|
+-- doc_gui_statechart/ -- Zustandsdiagramm, siehe Abschnitt
| Bedienungsanleitung/Menünavigation
|
+-- release/ -- Gesicherter Firmware-Binärstand
|
+-- src/ -- Firmwarequelltext
|
+-- src_simulated/ -- Zusatzdateien für Kompilierung zur
| Ausführung auf einem PC-System
|
+-- src_simulator_gui/ -- Java-Simulationsanwendung, siehe
| Tests/Simulator
|
+-- telegram_editor/ -- (Java) DCF77-Telegrammeditor, siehe
| Tests/Telegramm-Editor
|
+-- test/ -- Individuelle/Spezielle Testprogramme
| (idr. uninteressant für Benutzer)
|
+-- test_data/ -- DCF77-Testdatensätze
| zur Verarbeitung mit Test Framework
|
+-- test_framework/ -- Automatische Testanwendung, siehe
| Tests/Test-Framework
|
+-- xdev_font/ -- Quelldaten für eigene Schriftart
|
+-- xdev_impl1c/ -- alte C-Implementierung, 1. Versuch
|
+-- xdev_impl2c/ -- alte C-Implementierung, 2. Versuch
|
+-- xdev_misc/ -- vorbereitende Tests/Notizen
|
+-- README.md -- diese Beschreibung
|
+-- LICENSE.txt -- Lizenz für die Uhr
|
+-- LICENSE-THIRDPARTY.txt -- Lizenzübersicht für Komponenten
|
+-- dcf77vrd.gpr, alire.toml -- Alire-Projektdateien zum Kompilieren
|
+-- build.xml -- Software-Bauinstruktionen für `ant`Hardwaredesign
Im Laufe der Entwicklung wurden verschiedene Hardwarevarianten durchgespielt und dann jeweils wieder verworfen.
Genereller Aufbau
- Externes 5V Steckernetzteil
- Externe Antenne
- 4 Knöpfe zur Steuerung – 3 Taster (Modus, Zurück, Weiter) und ein Druckschalter (Wecker Ein/Aus)
- 5V VFD SPI-Displaymodul 128x64 px
- Buzzer als Weckalarm
- Lichtsensor zur automatischen Helligkeitsanpassung
Komponentenwahl
Bei den Komponenten wurde zuerst das Display festgelegt. Aus ästhetischen Gründen wurde ein VFD gewählt. Das Displaymodul ermöglicht eine freie Aufteilung des Bildschirminhalts und kommt dank SPI-Interface mit einer überschaubaren Anzahl an Leitungen zur Ansteuerung aus.
Anfänglich wurde ein Arduino Nano v3 eingesetzt, allerdings stellte sich nach langer Entwicklungsarbeit an der Software heraus, dass die Software zu groß für den Chip (und für die AVR-Architektur) geworden war. Daher wurde das Projekt auf Basis des Raspberry Pi PICO (RP2040) neugestartet. Dadurch wurde eine Umsetzung von den 3.3V IO-Spannung des RP2040 auf die 5V fürs Displaymodul erforderlich. Typische Wandlerchips dafür scheinen alle nur als SMD-Bauteile verfügbar zu sein. Daher wurde ein „Hack” mittels eines unidirektional genutzten Wandlerchips (SN74HCT245N) implementiert.
Beim Gehäuse wurde anfänglich eine quadratische Version genutzt, in deren Mitte dann ein großer Drehknauf plaziert worden wäre, mittels dessen man verschiedene Bildschirme „durchschalten” hätte können. Allerdings war die mechanische Stabilität zwischen Drehknauf und Achse schlecht und insgesamt die Drehknauflösung sehr klobig. Daher wurde für die neue Revision auf ein rechteckiges Gehäuse und statt eines Drehknaufs auf die Drucktaster für die Steuerung und den Druckschalter für den Wecker gesetzt.
Somit bleibt die Information “Wecker gestellt” auch bei Stromausfall erhalten und die Uhr kann beim Wiedereinschalten zwar nicht mehr die Weckzeit erinnern, aber mittels Buzzer signalisieren, dass die Weckfunktion ausgefallen ist.
Die Antenne sollte anfänglich im Gehäuse integriert werden, nachdem der Empfang aber aufgrund der Abstrahlung (oder Schirmung) durch die anderen Komponenten quasi unmöglich war, wurde die Möglichkeit des Anschlusses einer externen Antenne geschaffen. Da sich die Uhr aufgrund ihrer Größe und Versorgungsspannung vielleicht auch „portabel” einsetzen lassen könnte und um in Zukunft mit verschiedenen Antennenvarianten experimentieren zu können, wurde eine Steckerverbindung zur Antenne vorgesehen.
Blockschaltbild
+-------------+ +--------+
| |---------->| Buzzer |
| Netzteil 5V | +--------+
| +Sicherung | ^
| | +-----+ |
| |-->| LED | |
| | +-----+ |
| | ^ |
| | | |
| | +----------------+
| |-->| Externe Last |
+-------------+ | per Transistor | +------------------+
| | geschaltet. |<--| DCF77 Antenne |
v | | | (extern) |
+-------------+ | | +------------------+
| VFD SPI | | RPI 2040 PICO |
| Display | | | +------------------+
+-------------+ | |<--| Lichtsensor |
^ | 3.3V erzeugt | +------------------+
| | aus on-Board- |
+-------------+ | Regler | +------------------+
| Wandler |<--| |<--| Schalter/Taster |
| SN74HCT245N | | | | (Eingaben) |
+-------------+ +----------------+ +------------------+Aufgrund des ursprünglich für den Arduino vorgesehenen Designs läuft das Displaymodul mit 5V Betriebsspannung, die auch für das Netzteil als Ausgangsspannung gewählt wurde.
Der RPI 2040 benötigt jedoch 3.3V für sämtliche I/O-Ports, sodass für die Kommunikation mit dem Display der Wandler benötigt wird. Die 3.3V werden mit dem auf dem Raspberry Pi PICO-Board befindlichen Wandler erzeugt, der genug Strom liefert, um auch die Antenne und den Lichtsensor zu betreiben. Die Lasten für die LED-Hintergrundbeleuchtung des Wecker-Schalters und für den Buzzer werden über npn-Transistoren geschaltet.
Schaltplan
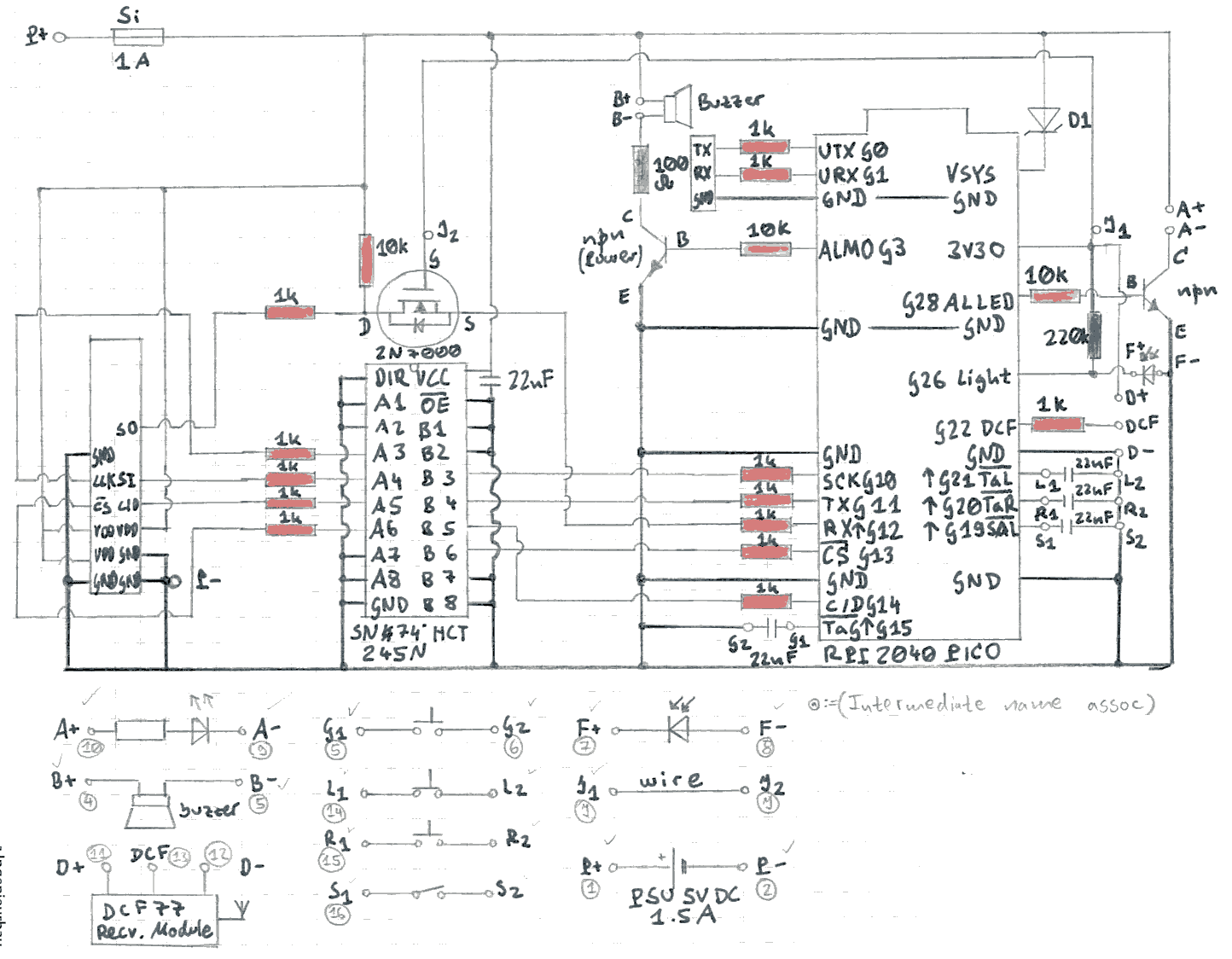
Der gezeigte Schaltplan entspricht weitgehend der Realisierung: Eine Abweichung gibt es lediglich bei der Beschaltung der nicht genutzten Kanäle des Wandlers: In der praktischen Umsetzung wurden hier die im Datenblatt empfohlenen und im Schaltplan fehlenden 10kΩ-Widerstände eingebaut, um die Robustheit weiter zu erhöhen.
Der prinzipielle Aufbau ist so gestaltet, dass in den digitalen Signalen jeweils 1kΩ-Widerstände sitzen, um bei Fehlern zu verhindern, dass große Ströme fließen können. Die Schalter- und Tastereingaben sind hardwareseitig mit Kondensatoren entprellt. Die Schottky-Diode D1 verhindert, dass bei Anschluss der USB-Schnittstelle am Raspi das VFD gespeist wird (es würde zu viel Strom ziehen).
Der Feldeffekttransistor 2N7000 ist ein diskreter Logikwandler von den 5V des Displays auf die 3.3V des Raspi. Da die Software von dieser Kommunikationsrichtung keinen Gebrauch macht, könnte man ihn vermutlich auch weglassen, ohne die Funktionalität einzuschränken.
Die mit TX/RX/GND-bezeichneten Punkte sind für eine Stiftleiste zum Anschluss eines Seriell-Wandlers gedacht, damit man am Rechner die Ausgaben des Programmes auch ohne Einschränkung durch die Displaygröße nachvollziehen kann. Dieser Weg war beim Debuggen hilfreich. Für die Umsetzung verschwindet die Stiftleiste im Gehäuse (ebenso wie der USB-Port).
Verdrahtungsplan
Der Verdrahtungsplan ist für eine Loch-Streifenrasterplatine vorgesehen, bei der drei Löcher jeweils mit einem Streifen verbunden sind. Auf diese Weise lassn sich ohne eigenes Platinenlayout Schaltungen realisieren.
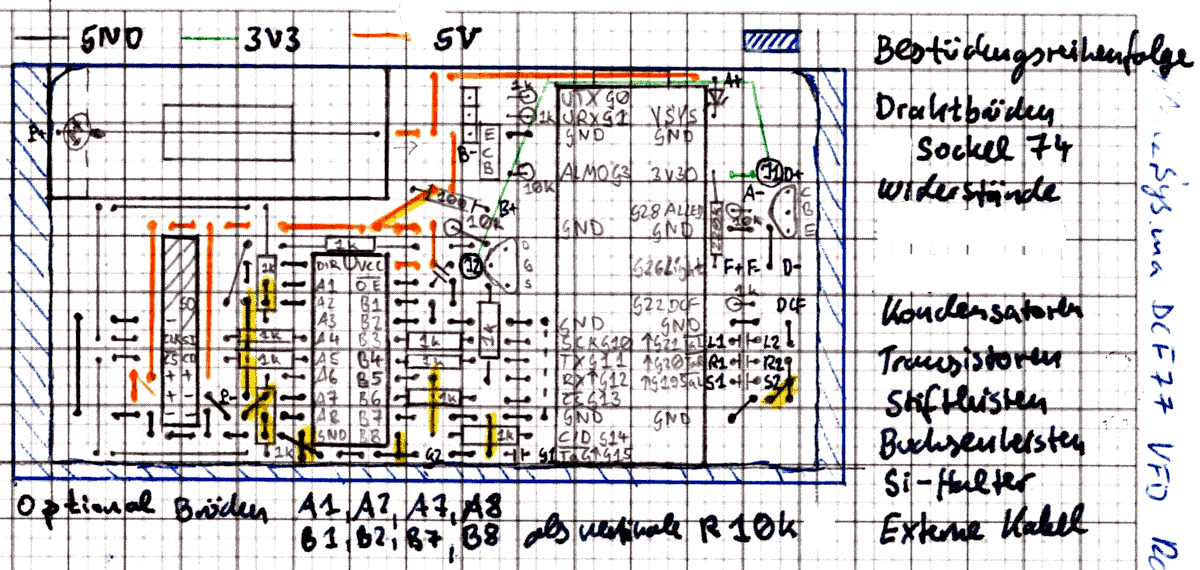
Auf dem dargsetllten Verdrahtungsplan sind die 10kΩ-Widerstände zum Schutz des Pegelwandlers noch nicht eingezeichnet, da diese erst bei der Bestückung eingebaut wurden.
Bei den gelb markierten Drahtbrücken ist auf die Bestückungsreihenfolge zu achten: Diese liegen teilweise unterhalb von anderen Teilen und müssen daher vor diesen eingebaut werden.
Antennenverbindung
Die Details zur Antennenverbindung sind in den Plänen nicht angegeben und daher hier in einem eigenen Abschnitt angegeben. Der Antennenstecker und das Kabel wurden folgendermaßen belegt:
| Kabel | Bedeutung | Pin |
|---|---|---|
| gelb | +5V | 1 |
| weiß | +3.3V | 2 |
| grün | Signal | 3 |
| braun | GND | 4 |
Für das ELV-Antennemodul genügen die 3.3V, die auch der Maximalwert sind, der über Signal ausgegeben werden darf. Falls ein Antennenmodul eine andere Versorgungsspannung benötigt oder eine bessere Filterschaltung für die Spannungsversorgung vorgeschaltet werden soll, können dank des 4-poligen Steckers und Kabels aber auch die 5V des Netzteils direkt angezapft werden, solange das Signal dann wieder mit Bezug auf die 3.3V ausgegeben wird.
Softwaredesign
Die Implementierung erfolgte in Ada, nachdem die Einschränkung auf C
oder C++ durch den Arduino nicht mehr vorhanden war. Die Vielseitigkeit
des Ada-Typsystems lässt sich bei diesem Projekt gewinnbringend
einsetzen, um das vorherige „Bit Fiddling” aus der C-Implementierung
abzulösen. Dank Unterstützung für Subprozeduren und Module (Packages)
können auch einige vormals sehr längliche Identifier wieder etwas kürzer
ausfallen. Beispiel: Der lange Funktionsname
dcf77_secondlayer_check_bcd_correct_telegram_ignore_eom ist
nicht mehr erforderlich, stattdessen ist es jetzt
Check_BCD_Correct_Telegram mit dem optionalen Parameter
Ignore_EOM im Package DCF77_Secondlayer.
Entsprechend des Designziels beschäfigt sich der Großteil des
Programmes mit der DCF77-Decodierung. Die hardwarenahen Teile sind
zentral in einem einzigen Modul untergebracht
(DCF77_Low_Level), sodass zum Test mit einer „virtuellen”
Hardware nur dieses Modul ersetzt und anders implementiert werden
muss.
DCF77-Decodierung
Vom Antennenmodul werden Pulse mit Längen von 100ms bzw. 200ms
geliefert, um eine logische 0 bzw. 1 zu codieren. Als Endmarkierung (60.
Puls) bleibt der Puls aus. Intern werden im Programm daher die
Ablesungen (Reading) Bit_0 (0), Bit_1 (1) und
No_Signal (3) unterschieden.

Die unterste Abstraktionsebene stellt der Bitlayer dar: Er
ist dafür zuständig, die Pulse zu erkennen und daraus die Ablesung zu
berechnen. Von der Interrupt Service Routine (ISR) im
DCF77_Low_Level wird periodisch (alle 7 ms) der GPIO-Wert
der Antenne eingelesen und als Bit (0/1) in einer Variable festgehalten.
Der aktuelle Stand dieser Bits wird vom Bitlayer alle 100 ms abgeholt
und mittels zweier deterministischer endlicher Zustandsautomaten
vorgefiltert, um die Inputs 1, X1, 0, X0 und ANY zu unterscheiden, die
typischerweise 14-15 GPIO-Werte innerhalb der 100ms als nur-1en (1),
nur-0en (0) bzw. gemsichte Daten (X1, X0, ANY) zusammenfassen. Diese
Inputs gehen dann in einen großen Zustandsautomat (vgl. Abbildung),
dessen Zustand zwischen mehreren Aufrufen des Bitlayers erhalten bleibt.
Typischerweise steht beim 10. Zustandsübergang die Ablesung (Reading)
fest und wird an die nächste Ebene ausgegeben. No_Update
(2) wird ausgegeben, solange noch keine Ablesung vorliegt. Zusätzlich zu
der Verarbeitung implementiert der Bitlayer den Ticker, der
dafür sorgt, dass der Code in definierten Zeitintervallen von 100 ms
ausgeführt wird.
Darüber befindet sich der Secondlayer. Die Idee hinter dieser Schicht ist es, die Ablesungen der letzten 9 Minuten vorzuhalten und anhand der Muster (bspw. Lage der Endmarkierung) die einzelnen DCF77-Telegramme (Telegram) zu erkennen. Außerdem wird zur Verbesserung des Empfangs ausgenutzt, dass sich innerhalb von 10 Minuten maximal 1x der Minuten-Zehner ändert. Damit können mehrere aufeinanderfolgende Telegramme zusammengelegt werden, um fehlende empfangene Bits (No_Signal) zu eliminieren (X_Eliminate). Insgesamt werden daraus bis zu zwei Telegramme synthetisiert: Telegram_1 enthält das zuletzt vollständig empfangene (“aktuelle”) Telegramm und Telegram_2 alles, was zum vorherigen Minuten-Zehnerstand zugeordnet werden konnte.
Der Minutelayer nutzt diese Daten, um die eigentliche
Decodierung durchzuführen. Im einfachsten Fall ist der Empfang (nahezu)
perfekt und das Datum und die Uhrzeit lassen sich aus dem Telegram_1
vollständig decodieren. In diesem Fall wird „perfekte Empfangsqualität”
mittels Quality Of Service 1 (QOS1) signalisiert. Falls eine
derart einfache Decodierung nicht möglich ist, werden verschiedene
Verfahren zum Einsatz gebracht, um die fehlenden Daten zu ermitteln,
wobei mit höherem QOS-Wert die Qualität der Widerherstellung abnimmt.
Kann das Programm überhaupt keinen Zusammenhang mehr zwischen den
empfangenen Telegrammen und der aktuellen Uhrzeit herstellen fällt es
auf QOS9_ASYNC zurück, was so viel heißt, wie dass die Uhr
asynchron zum DCF77-Zeitsignal läuft.
Eine Schicht oberhalb befindet sich der Timelayer, der eine
Konsistenzprüfung aufeinanderfolgender ausgegebener Uhrzeiten vornimmt
und abhängig vom aktuellen QOS-Level den Ergebnissen des Minutelayer
Priorität einräumt oder unter Umständen auch ein berechnetes Ergebnis
gegenüber dem angeblich decodierten bevorzugt. Dies dient der Vermeidung
von extremen Zeitsprüngen, die auftreten können, wenn fälschlicherweise
zusätzliche Signale erkannt werden. Dadurch können nämlich der
Secondlayer und Minutelayer durcheinander geraten und fehlerhafte
Datums- und Uhrzeitinformationen liefern. Der Status des Timelayers wird
mit einem Zeichen (+, o oder -)
dargestellt, wobei + darauf hinweist, dass die Berechnungen
mit den Beobachtungen übereinstimmen und somit eine synchronisierte und
verlässliche Uhrzeit angezeigt wird.
Hardwareabstraktion
Die Ansteuerung der Hardware efolgt mittels der
Low-Level-Bibliothek (DCF77_Low_Level). Darüber
hinaus wird für die Abstraktion des Displayprotokolls eine eigene
Bibliothek (DCF77_Display) genutzt.
Bedienoberfläche
Die wesentliche Bedienlogik ist in der DCF77_GUI
codiert. Das Modul ist gleichzeitig auch der Einstiegspunkt für das
Programm. Die Bedienlogik mit den drei Tastern und zwei Schaltern ist in
der Anleitung beschrieben (vgl. weiter unten).
Die GUI übernimmt zusätzlich zu reinen “Anzeigefunktionen” auch noch folgende Aufgaben:
- Eingabe der Weckzeit
- Einstellung von Datum- und Uhrzeit
Zusatzfunktionen
Das Modul DCF77_Alarm stellt die Berechnungen zur
Erkennung des Eintretens von Weckzeitpunkten bereit und verwaltet die
Weckzeit, sowie die Buzzersteuerung.
Im Modul DCF77_Ambient_Light_Sensor ist die Verstellung
der Anzeigehelligkeit in Abhängigkeit der Umgebungshelligkeit
codiert.
Nachbau
Grundsätzlich habe ich die Uhr bisher erst genau dieses eine Mal
gebaut. Von daher ist es nicht unwahrscheinlich, dass die Pläne noch den
ein oder anderen Fehler enthalten, der im Rahmen der Ausführung erst
korrigiert wurde. Es ist daher dringend geraten, Schaltplan,
DCF77_Low_Level und Verdrahtungsplan spätestens vor der 1.
Inbetriebnahme abzugleichen.
Lizenz
Die Software und Hardwarebeschreibung in diesem Repository sind
freie Software. Damit ist bspw. ein Nachbau ohne Zahlung von
Lizenzgebühren möglich. Alles in diesem Repository enthaltene außer
release/ und src/dcf77_display-font.ads steht
unter folgender Expat-Lizenz:
MIT License
Ma_Sys.ma DCF77 VFD Raspi Clock (c) 2018-2025 Ma_Sys.ma <info@masysma.net>
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
SOFTWARE.Da diese Entwicklung unter Anderem eine Schriftart unter SIL OFL und
die Hardwareabstraktion zur Programmierung des RP2040 mittels Ada
verwendet, sind weitere Lizenzen für diese Komponenten anwendbar, die
sich auf den im Repository enthaltenen Ordner release/ und
die Datei src/dcf77_display-font.ads auswirken. Alle
anwendbaren Lizenzen für diese Komponenten sind in der Datei
LICENSE-THIRDPARTY.txt zusammengestellt.
Software
Die Software kann mittels Alire-Buildtool kompiliert werden und
anschließend mit elf2uf2 für den Raspberry konvertiert
werden, sodass man sie im Boot-Modus (BOOT-Taster gedrückt halten beim
USB-Anschließen) auf den am Hostsystem gemeldeten Massenspeicher
kopieren kann.
Die genauen Kommandos zum Bauen der Software stehen im
build.xml. Wenn ant, alr und
elf2uf2 installiert sind, genügt ggfs. ein
ant-Aufruf, um das fertige Programm unter
bin/dcf77vfd.uf2 zu bauen.
Stückliste
Die folgende Stückliste beschreibt, welche Teile in der Uhr verbaut wurden. Im Laufe der Entwicklung wurden noch deutlich mehr Teile (bspw. Gehäuse- und Schaltervarianten, Arduino Nano) bestellt, die jedoch nicht alle im finalen Design enthalten sind.
Inzwischen sind schon nicht mehr alle Teile lieferbar. Die meisten Teile lassen sich jedoch gegen gleichwertige Alternativen ersetzen.
Einzig die schlechte Verfügbarkeit des Displays könnte einen Nachbau
behindern. Beim Reichelt war es zum Zeitpunkt der Erstellung dieser
Dokumentation nämlich nicht mehr lieferbar. Die Wahl eines alternativen
Displays kann Anpassungen am Schaltplan, Verdrahtungsplan und am
Displaytreiber (DCF77_Display) erforderlich machen.
| Lieferant | Anzahl | Beschreibung | Stückpreis/€ | Gesamtpreis/€ | Bestellnummer mit Link |
|---|---|---|---|---|---|
| conrad.de | 1 | Antennengehäuse | 3.79 | 3.79 | 1977726-62 |
| conrad.de | 1 | Buchse für Antennenanschluss | 11.04 | 11.04 | 738657-62 |
| conrad.de | 10* | Feinsicherung 6.3x32 1.0A T | 3.79 | 523965-62 | |
| conrad.de | 1 | Flachbandkabel 20pol RM2.54 | 2.70 | 2.70 | 2103807-62 |
| conrad.de | 1 | Gehäuse | 20.99 | 20.99 | 522512-62 |
| conrad.de | 1 | Kabelverschraubung M12 (f.Ant.) | 0.56 | 0.56 | 1521098-62 |
| conrad.de | 1 | Lichtsensor NaPiCa AMS302 | 2.85 | 2.85 | 504926-62 |
| conrad.de | 1 | Stecker für Antenne | 12.99 | 12.99 | 738864-62 |
| conrad.de | 2 | Steuerleitung 4x0.25mm² (Ant.) | 2.29 | 4.58 | 1180024-62 |
| conrad.de | 1 | Summer KPMB-G2206L-K6405 | 3.29 | 3.29 | 715057-62 |
| conrad.de | 1 | Taster Grün | 4.79 | 4.79 | 701259-62 |
| conrad.de | 2 | Taster Blau | 4.99 | 9.98 | 701260-62 |
| conrad.de | 4 | Abstandsbolzen 7mm x 10mm | 0.10 | 0.60 | 526363-62 |
| conrad.de | 100* | Widerstände 10k 0.25W 5% (Pkg) | 2.29 | 1584380-62 | |
| conrad.de | 100* | Widerstände 1k 0.25W 5% (Pkg) | 2.29 | 1584383-62 | |
| conrad.de | 1 | Versandkosten ab 59.95€ = 0 | 0.00 | 0.00 | |
| elv.de | 1 | DCF-Empfangsmodul DCF-2 (Ant.) | 9.95 | 9.95 | 091610 |
| elv.de | 1 | Versandkosten Best.-Wert. < 29€ | 3.99 | 3.99 | |
| reichelt.de | 1 | Abdeckung f. Operator, rund, rot | 0.71 | 0.71 | A01-63 ROT |
| reichelt.de | 1 | Anschlussbuchse 5.6mm/2.1mm | 1.25 | 1.25 | HEBLM 21 |
| reichelt.de | 2 | Buchsenleiste 20-pol, RM2.54 | 0.30 | 0.60 | BL 1x20G8 2,54 |
| reichelt.de | 1 | IC-Sockel 20-pol | 0.08 | 0.08 | GS 20 |
| reichelt.de | 1 | LED 6V für Serie A01 - amber | 6.20 | 6.20 | A01 LED6V GE |
| reichelt.de | 1 | LED-Halter Außenreflektor | 0.90 | 0.90 | VOSS WU-A-5 |
| reichelt.de | 100* | Karosseriescheiben 3.2mm | 1.99 | 1.99 | SKA 3,2X9-100 |
| reichelt.de | 4 | Kondensator 22nF | 0.10 | 0.40 | X7R-2,5 22N MUR |
| reichelt.de | 2 | MOSFET (1 Reserve) | 0.08 | 0.16 | 2N 7000 DIO |
| reichelt.de | 100* | Muttern M2.5 | 1.85 | 1.85 | SK M2,5-100 |
| reichelt.de | 1 | Netzteil 5V 1.5A 5.5mmx2.1mm | 7.20 | 7.20 | HNP 06-050L6 |
| reichelt.de | 1 | Operator, bel.bar, rastend, rund | 7.20 | 7.20 | A01-09R |
| reichelt.de | 1 | Punkt-Streifenrasterp. 160x100mm | 2.70 | 2.70 | H25PS160 |
| reichelt.de | 1 | Raspberry Pi Pico, RP2040 | 3.95 | 3.95 | RASP PI PICO |
| reichelt.de | 1 | Schalterblock f. A01, 2xUM | 6.68 | 6.68 | A01-52B |
| reichelt.de | 1 | Schottkydiode (1 Reserve) | 0.07 | 0.14 | 1N 5819RL STM |
| reichelt.de | 200* | Schrauben M2.5 12mm Schlitz | 1.99 | 1.99 | SZK M2,5X12-200 |
| reichelt.de | 1 | Sicherungshalter 6.3mm x 32mm | 1.60 | 1.60 | SCH 318002 |
| reichelt.de | 1 | Stiftleiste 1x3-pol RM2.54 | 0.08 | 0.08 | MPE 087-1-003 |
| reichelt.de | 2 | Stiftleiste 1x20-pol RM2.54 | 0.36 | 0.72 | MPE 087-1-020 |
| reichelt.de | 1 | Stiftleiste 2x10-pol RM2.54 | 0.35 | 0.35 | MPE 087-2-020 |
| reichelt.de | 2 | Transceiver (1 Reserve) | 0.70 | 1.40 | SN 74HCT245N TEX |
| reichelt.de | 1 | VFD-Displaymodul 5V | 39.30 | 39.30 | LCD-128X64BK AA |
| reichelt.de | 1 | Widerstand 100Ω, 2W | 0.10 | 0.10 | VIS PRO200020103 |
| reichelt.de | 1 | Versandkosten (immer) | 5.95 | 5.95 | |
| Vorrat | 1 | Anschlusskabel für Lichtsensor | |||
| Vorrat | 3 | Kabelbinder | |||
| Vorrat | Lötzinn bleifrei | ||||
| Vorrat | 1 | npn-Transistor klein | |||
| Vorrat | 1 | npn-Transistor Leistung | |||
| Vorrat | 3 | Schaltlitze Schalteranschluss | |||
| Vorrat | 1 | Widerstand 220kΩ |
*) Packungsgröße, effektiv wurden nicht alle Teile verbaut, Vorrat := Wurde nicht extra für dieses Projekt eingekauft und daher auch nicht in den Kosten erfasst.
Gesamtkosten nur für benötigte Teile 193.97€ davon 9.95€ Versand.
Hardwarezusammenbau
Geeignete Werkzeuge für die Kunststoffbearbeitung und einen Lötkolben vorausgesetzt, sollte der Zusammenbau weitgehend selbsterklärend sein.
Da das Antennenkabel relativ starr ist, gibt es ggfs. Sinn, es etwas länger (bspw. 2m) zu wählen, damit man eine Chance hat, die Antenne auszurichten, ohne, dass sie sich aufgrund der Starrheit des Kabels wieder in die falsche Position dreht.
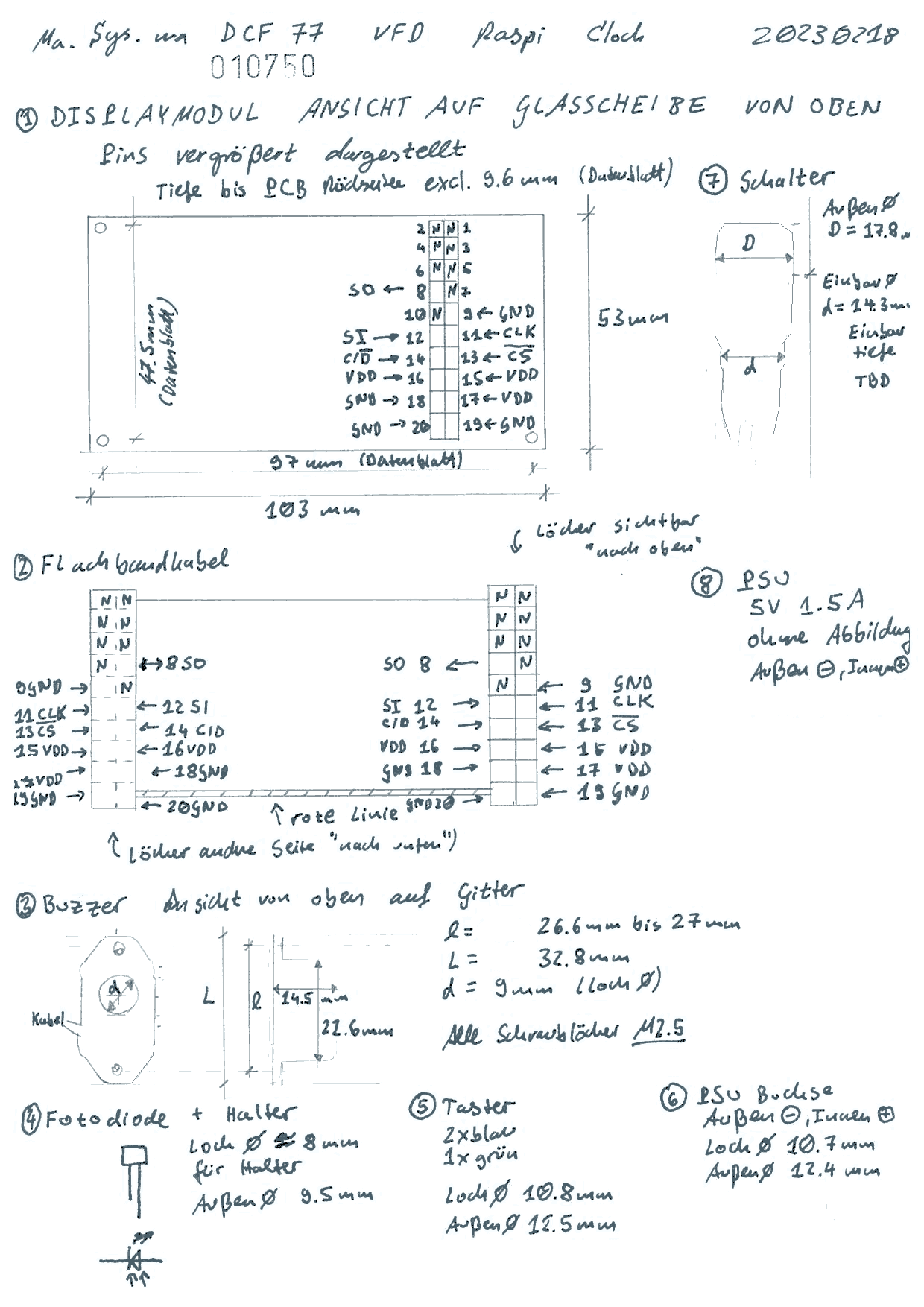
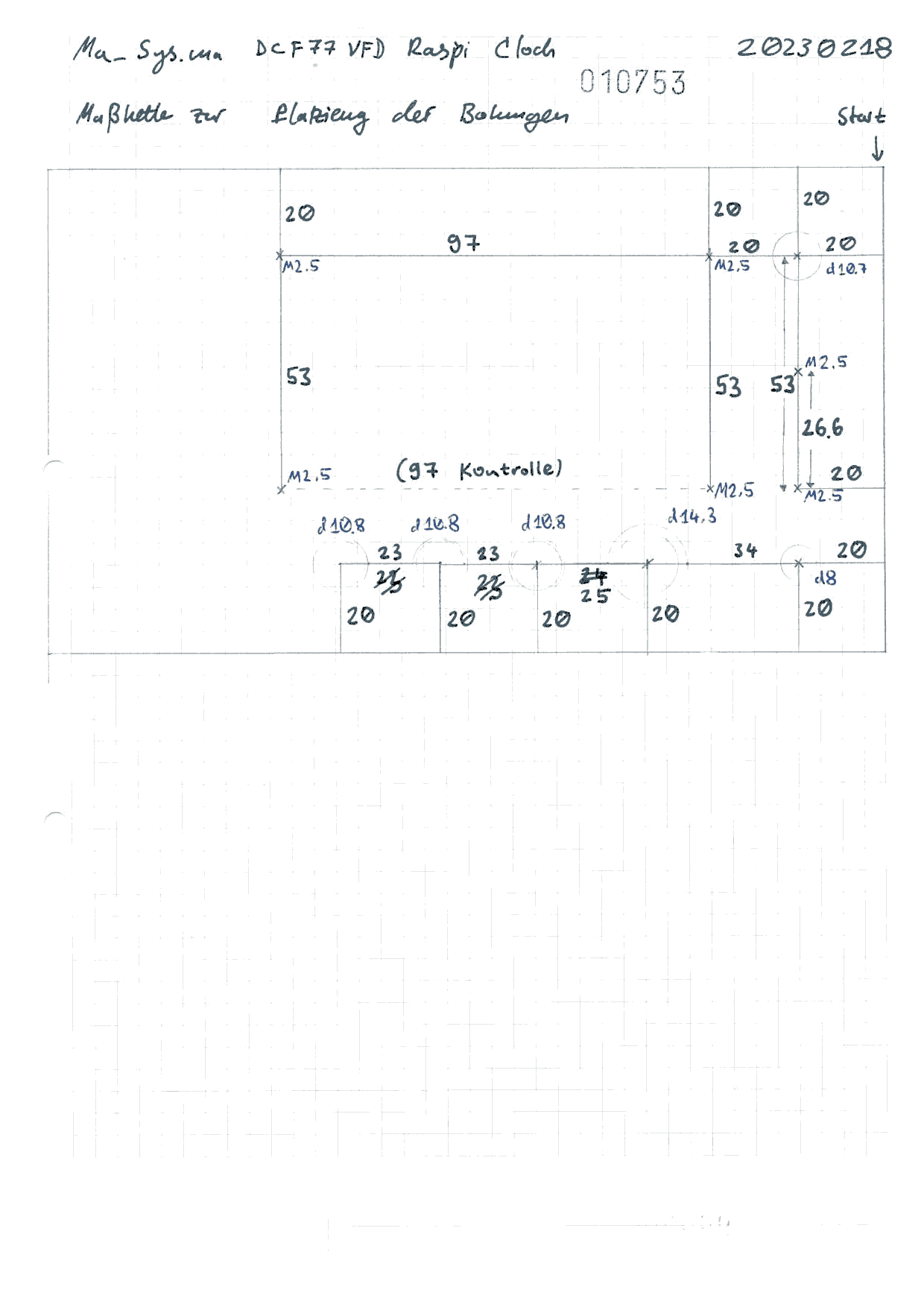
Skizzen zu Komponenten
Zum fehlerfreien Zusammenbau der Uhr wurden einige Skizzen angefertigt. Für den Nachbau können diese gerne zu Rate gezogen werden, sollten aber anhand der tatsächlich vorliegenden Teile, Pläne und Datenblätter kontrolliert werden, da bspw. bei den Maßen des Displays Unstimmigkeiten bestehen können.
Tests
Zur Software gehören diverse Test- und Hilfsprogramme, die bei der DCF77-Entwicklung (ggfs. auch in anderen Projekten) helfen können.
Telegramm-Editor
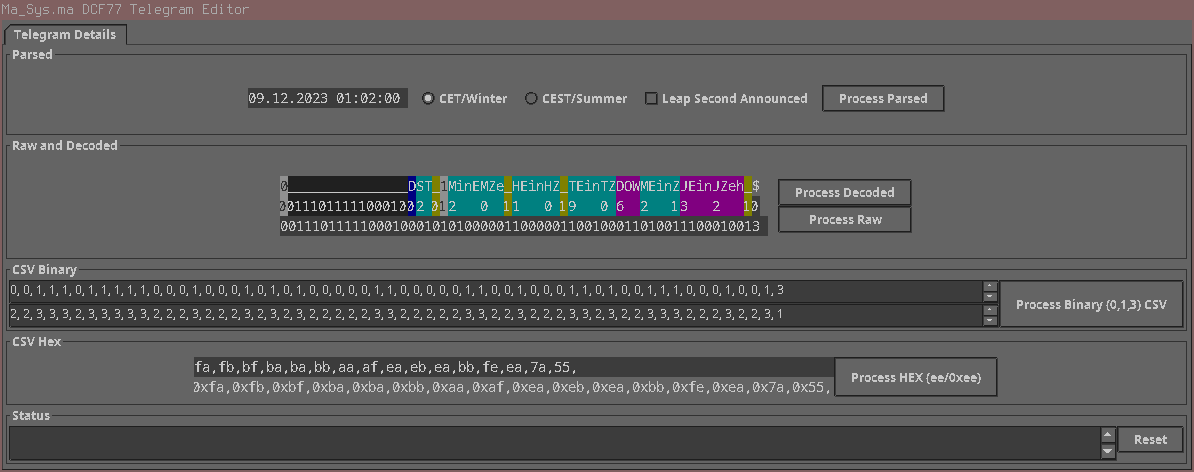
Im Ordner telegram_editor befindet sich ein in Java
geschriebener DCF77-Telegrammeditor, der sowohl Telegramme decodieren,
als auch ein „virtuelles” Telegramm zu einer gegebenen Datums- und
Uhrzeitangabe berechnen kann. Er unterstützt darüber hinaus mehrere
CSV-Formate, die teilweise bei der Entwicklung des 1.
Implementierungsversuchs in C hilfreich waren.
Simulator
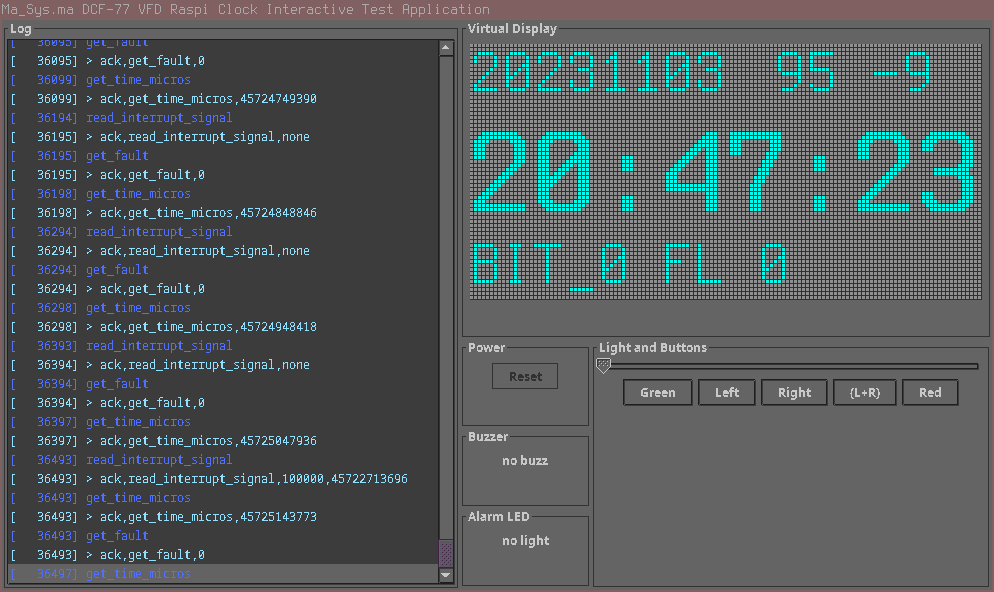
Unter src_simulated befinden sich diverse Symlinks und
einige zusätzliche Dateien, mit denen sich das Programm auf dem
Hostsystem kompilieren und ohne die eigentliche Hardware ausführen
lässt. Das Interface ist dann ein „interaktives” Konsolenprogramm
(stdin/stdout). Um dieses zu steueren wurde eine GUI in Java entwickelt
(src_simulator_gui), die das Executable startet und die
Interaktion per Pipe übernimmt. Damit kann man bspw. interaktiv die GUI
oder testen oder live zusehen, wie die virtuelle Uhr das vorgefertigte
Telegramm aus der enthaltenen testvector.csv
verarbeitet.
Test-Framework
Unter test_framework liegt ein Ada-Programm, welches
zusammen mit dem Code aus src_simulated zu einem
dcf77_test_runner kompiliert werden kann.
Mit diesem Testprogramm lassen sich XML-Dateien laden, in denen jeweils Testdaten in Form von Telegrammen und erwarteten Datums-Uhrzeit-Ergebnissen oder relevanten Berechnungszwischenständen abgelegt sind.
Auf diese Weise lassen sich automatisiert auch sehr spezielle Fälle wie bspw. Schaltsekunden testen. Mit gewissen Einschränkungen erlauben diese Tests auch das Einstreuen von Störungen, indem man bspw. die 0/1-Werte aus den Telegrammen durch Ersetzen mit 3-Ziffern überschreibt und somit Empfangsprobleme simuliert.
Falls man ein eigenes DCF77-Projekt entwickelt, könnten insbesondere die QOS- und Timelayer-Testdaten interessant sein, da dort auch jeweils der erwartete Zeitstempel angegeben ist, zu dem die Eingabedaten decodiert werden sollten.
Mittels ant cov im Ordner test_framework
kann das Test-Framework auch so aufgerufen werden, dass die
Line-Coverage mittels lcov ermittelt wird und im
Ordner cov ein HTML-Report abgelegt wird. Dieser Report
kann hilfreich sein, wenn man sich unsicher ist, ob ein gewisser
Codeabschnitt überhaupt durch die Tests erreicht wird.
Serielle Ausgabe
Wenn man die serielle Ausgabe überwachen will, kann man folgenden
Befehl nutzen. Dabei ist das Seriell-Gerät (ttyUSB0) auf
das jeweilige System anzupassen:
picocom --baud 115200 --stopbits 1 --databits 8 --parity n /dev/ttyUSB0Bedienungsanleitung
Diese Anleitung beschreibt die Verwendung der DCF77 VFD Raspi Clock.
Bis auf die Aktivierung der Weckfunktion können keine Einstellungen getätigt werden, die über das Trennen der Stromversorgung hinaus Bestand haben. Ist die Weckfunktion zum Einschaltzeitpunkt aktiviert, ertönt sofort der Buzzer (unabhängig von der Uhrzeit), sodass man auch bei Stomausfall keine Weckung verpasst, sofern der Strom rechtzeitig zum Weckzeitpunkt zurückkehrt.
Standardbetrieb mit DCF77-Antenne
Der empfohlene Standardsbetriebsmodus ist unter Verlass auf das DCF77-Zeitsignal. Dazu muss die externe Antenne angeschlossen werden. Anschließend wird das Netzteil angeschlossen und die Uhr synchronisiert sich selbständig mit dem Zeitsignal.
Die gelungene Synchronisation kann in der oberen rechten Ecke des Bildschirms abgelesen werden, wobei (+1) die beste Empfangsqualität und (-9) eine fehlende Synchronisierung signalisieren.
Im linken Teil des Bildschirms wird die Uhrzeit dargestellt, rechts daneben der Sekundenzähler und das Datum. Unten rechts wird die eingestellte Weckzeit angezeigt, sofern der Wecker aktiv ist.
Menünavigation

Die 4-Tasten-Bedienung folgt folgender Überlegung:
- Der linke grüne Taster (grün) ist für die Navigation “runter” bzw. innerhalb von Untermenüs für den Wechsel zwischen Bearbeiten/Navigieren gedacht.
- Die mittleren beiden blauen Taster sind für das Verstellen von Zahlenwerten (+/-) bzw. die Navigation (links/rechts) gedacht.
- Der rechte rote Schalter (Al.ein/Al.aus) ist exklusiv für die Weckereinstellung gedacht: Ist er grdrückt ist der Weckalarm scharfgeschaltet und der Buzzer ertönt, sobald die eingestellte Weckzeit das nächste Mal erreicht wird.
Das Diagramm zeigt schematisch, welche Anzeige man ausgehend von einer gegebenen Startanzeige (Anfang oben links) durch Drücken der Tasten erreicht.
Weckfunktion
Weckzeit stellen
Zum Einstellen einer Weckzeit ist ausgehend vom Startbildschirm einmal grün und dann rechts zu drücken. Anschließend lässt sich mit grün das Bearbeiten des Stundenwerts aktivieren, mit links/rechts verstellen und anschließend mit grün speichern und mit rechts zum nächsten Feld (Weckzeit-Minute) wechseln. Dieses wird wieder mit grün bearbeitbar gemacht, mit links/rechts verstellt und durch grün gespeichert. Ein Druck auf rechts führt anschließend zurück zur Hauptansicht.
Wecker scharfschalten
Die Weckeinstellung wird mit dem roten Schalter scharfgeschaltet. Der Schalter verharrt in der Position und sichert so den Einschaltzustand des Weckers unabhängig vom Stromnetz.
Die aktive Weckfunktion wird durch die orangene Hintergrundbeleuchtung des Schalters und durch Anzeige der Weckzeit auf dem Startbildschirm signalisiert.
Wecker auslösen
Sobald die Weckzeit erreicht ist, löst der Wecker mittels Buzzergeräusch und blinkendem roten Schalter aus.
Sollte der Strom ausfallen oder aus anderen Gründen die Uhr bei aktivierterm roten Schalter mit der Spannungsversorgung verbunden werden, so aktiviert sich der Buzzer sofort (unabhängig von einer eventuell vorher gestellten Weckzeit). Damit wird verhindert, dass ein nächtlicher Stromausfall die Weckfunktion außer Kraft setzt, allerdings kann es dadurch zu verfrüher oder verspäteter Auslösung (je nach Dauer des Stromausfalls) kommen.
Wecker abstellen
Der Wecker kann durch Druck auf den roten Schalter abgestellt werden.
Erfolgt ein solches Abstellen auch nach 90 min nicht, wird der Buzzer abgeschaltet und der Wecker-Schalter blinkt solange weiter, bis die Stromversorgung getrennt oder der rote Schalter zum Abstellen des Weckers betätigt wurde.
Die 90 min-Abschaltung soll verhindern, dass vergessene und unbeaufsichtigte Wecker pausenlos vor sich hin lärmen. Außerdem ist zu erwarten, dass die meisten Nutzer innerhalb des 90 min-Zeitraums aufwachen. Andernfalls könnte ein lauterer Wecker erforderlich sein.
Uhrzeit verstellen
Eine verstellte Uhrzeit ist nur solange wirksam, wie kein anderslautendes Signal per DCF77 empfangen wird. Um eine eigene Uhrzeitvorgabe dauerhaft festzulegen muss die Antenne abgestöpselt werden. Im Betrieb ohne DCF77-Zeitsignal ist jedoch mit einer starken Abweichung über die Zeit zu rechnen!
Mittels 2x grün navigiert man zum Uhhrzeitbearbeiten. Mit rechts wird das Menü betreten und darin können der Reihe nach die Werte für Uhrzeit (Stunde, Minute, Sekunde) und anschließend das Datum (Jahrhundert, Jahr, Monat, Tag) bearbeitet werden. Das Bearbeiten der Zahlen erfolgt analog zum Wecker-Stellen.
Statusinformationen anzeigen
Mittels 3x grün kann man vom Startbildschirm ins Informationsmenü navigieren. Darin können mittels rechts verschiedene Bildschirme durchgeschaltet werden. Ihre Bedeutung ist nachfolgend erläutert.
CTRInfo
Der CTRInfo-Bildschirm zeigt Zahlenwerte, die interne Variablen des Uhrprogramms anzeigen:
Erste Zeile
LL.Get_FaultBitlayer.Get_UnidentifiedBitlayer.Get_OverflownBitlayer.Get_Delay / 1000(typischerweise um die 70)
Zweite Zeile
Secondlayer.Get_Fault.Minutelayer.Get_Fault- Die am Umgebungshelligkeitssensor erkannte Helligkeit
(
Light_Sensor_Reading) im Bereich 0..100. Praktisch werden nur Werte bis knapp über 80 erreicht.
Wenn Get_Fault oder Get_Unidentified hohe
Werte zeigen, kann das ein Indikator für gestörten Signalempfang bzw.
falsche Antennenausrichtung sein.
QOSInfo
Der QOSInfo-Bildschirm zeigt in zwei Zeilen (M für Minutelayer und T für Timelayer) Informationen zur Verteilung der Quality of Service in diesen Schichten an. Die Bedeutung der Spalten ist folgendermaßen:
- Spalte: Anzahl der Sekunden mit QOS schlechter als QOS1 (Timelayer:
schlechter als
+) und besser als QOS9 (Timelayer:-) innerhalb der letzten 24h. - Spalte: Anzahl der Sekunden mit QOS auf schlechtester Stufe
(Minutelayer: QOS9, Timelayer:
-) innerhalb der letzten 24h. - Spalte: Anzahl der 24h-Intervalle in denen eine der vorherigen Spalten nicht 0 war.
Die Idee bei dieser Aufteilung ist, dass die vorderen Spalten einen guten Überblick über die “aktuelle” QOS-Verteilung liefern, während die hinterste Spalte als Akkumulator dient. Wenn dort bspw. auch nach wochenlangem Betrieb nur kleine Werte stehen, dann ist der Empfang sehr gut.
Solange die Uhrzeit initial noch nicht synchronisiert ist, ist die Empfangsqualität notwendigerweise schlecht, daher ist es normal, dass während der Synchronisationsphase die Zähler sekündlich hochzählen.
Bit.
Auf diesem Bildschirm wird für den Bitlayer dargestellt, in
welchem Zustand sich dieser befindet. In der oberen rechten Ecke steht
der letzte ermittelte Input (1, X1, 0, X0, ANY) und un der unteren
rechten Ecke ein zugehöriger Zählerwert (Buf_Ctr).
Dieser Bildschirm dient hauptsächlich dazu, visuell zu beobachten, ob der Bilayer-Zustandasautomat in korrekter Weise durchlaufen wird.
BitOszi
Das „virtuelle Oszilloskop” zeigt die in den Bitlayer eingehenden
Daten. In der ersten Zeile steht eine Visualisierung der Daten, wie sie
von der ISR geholt wurden und in der zweiten Zeile eine
vorgefilterte-Variante nach Verarbeitung durch die Routine
Filter_And_Validate.
In der Darstellung steht _ für 0, * für
1.
Last1/2 und Last2/2
Die beiden Last-Bildschirme zeigen die zuletzt decodierten
Sekunden-Bits für bis zu eine Minute, jeweils maximal 16-Bit pro Zeile.
Der Cursor _ zeigt an, wo das nächste Bit gelesen wird.
Wenn man länger auf einem der Bildschirme stehen bleibt, wechselt das
Programm automatisch zwischen Last1/2 und Last2/2,
sodass das jeweils aktuell gelesene Bit auf dem Schirm steht.
Versionsinformationen
Mittels 4x grün kann man vom Startbildschirm zum Versionsmenü navigieren.
Die zugehörigen drei Bildschirme geben Auskunft über die Firmwareversion, den Softwareentwickler und Kontaktinformationen zum Softwareentwickler.
Abschließende Überlegungen
Der Ansatz, live dem Signal zu folgen funktioniert prinzipiell, setzt aber sehr gute Empfangsbedingungen voraus. Die Annahme, dass immer entweder ein korrektes Signal oder gar kein Signal empfangen wird stimmt in der Praxis nicht 100%. Bei schlechtem Empfang werden auf diese Weise sehr leicht Störungen eingetragen, die zu falschen Uhrzeiten führen.
Entsprechend ist das Modell anderer Funkuhren, die primär auf Basis einer internen RTC laufen und sich nur gelegentlich mit dem DCF77-Signal abgleichen nachvollziehbar und vorteilhaft.
Bugs
Wenn ich es richtig sehe geht die Uhr 1sec vor. Es ist nicht ganz klar, ob sich das “gewinnbringend” lösen lässt in dem Sinne, dass man ggfs. ausnutzen kann, 1sec mehr Zeit zu haben, um zu prüfen, ob wirklich die korrekte Zeit berechnet wurde. In der Zwischenzeit wird der Fehler erstmal hingenommen…
Versionshistorie
| Version | Datum | CTR | Beschreibung |
|---|---|---|---|
| 01.00.00 | 2024-06-14 23:12:32 | 46- | 1. Release |
| 01.01.00 | 2024-12-07 16:21:11 | 47 | Stabilitätsverbesserungen mit Fuzzing |
| Schriftart ‘6’ besser von ‘5’ unterscheidbar | |||
| 01.02.00 | 2024-12-19 23:42:08 | 48 | Synchronisationsverlust bei >2 Wochen |
Betriebsdauer behoben
(DCF77_Bitlayer) |
|||
| 01.03.00 | 2025-01-05 14:48:49 | 50 | Komplett überarbeiteter Bitlayer |
| Options-Bildschirme entfernt | |||
| 01.04.00 | 2025-04-30 22:02:14 | 51 | Zusätzliche Debuginformationen für Wecker |
Hilfreiche Links
Interner Link: dcf77_vfd_roehren_bausatz_dcf77_melody(37) – ein weiteres DCF77-VFD-Projekt, welches beim Ma_Sys.ma dokumentiert ist, jedoch in diesem Fall auf Basis eines Bausatzes.
Unter https://dcf77logs.de/live gibt es eine Live-Ansicht der aktuellen DCF77-Daten, sowie historische Datensätze zum Download. Die Seite ist bei der Entwicklung von eigenen DCF77-Projekten sehr hilfreich!
Blinkenlight Experiments (blinkenlight.net) enthält und erklärt ebenfalls eine umfangreiche DCF77-Uhrenimplementierung. Diese hat noch eine größere “Fertigungstiefe”, da sie auch auf den Analogteil des Signalempfangs eingeht, der in der Ma_Sys.ma-Implementierung komplett auf das DCF77-Antennenmodul abgewälzt wird. Besonders intereessante Unterseiten:
- https://blog.blinkenlight.net/experiments/dcf77/dcf77-receiver-modules/
- https://blog.blinkenlight.net/experiments/dcf77/binary-clock/
- https://blog.blinkenlight.net/experiments/dcf77/phase-detection/
- https://blog.blinkenlight.net/experiments/dcf77/second-decoder/
- https://blog.blinkenlight.net/experiments/dcf77/decoding-everything/
- https://blog.blinkenlight.net/experiments/dcf77/local-clock/
- https://blog.blinkenlight.net/experiments/dcf77/the-clock/
DCF77-Elektronik
VFD-Elektronik
- https://bastelnmitelektronik.jimdo.com/bauteile-werkzeuge-aufbau/bauteilebeschreibungen/vakuumfluoreszenzanzeige/ – Erklärung zu VFD-Funktionsprinzip und -Ansteuerung
- https://vfdclock.jimdofree.com/2013/04/26/inrc09ss49t%E5%9E%8Bvfd%E6%98%BE%E7%A4%BA%E6%A8%A1%E5%9D%97%E7%9A%84%E5%88%B6%E4%BD%9C/ – Selbstbau eines VFD-Displaymoduls (auf Chinesisch!)
- https://medium.com/@rxseger/reverse-engineering-the-pinout-of-vacuum-fluorescent-displays-vfds-hnv11ss27-fip7fm7-and-hnv-8a00b0530b52 – Reverse-Engineering der Pinbelegung eines DCF77-Displays
Sonstige Elektronik
- https://electronics.stackexchange.com/questions/97889/bidirectional-5-v-to-3-3-v-level-shifter – Logik-Pegelwandler
- https://www.redesmadrid.com/?page_id=360 – Empfang von RDS statt DCF77
- https://www.avrfreaks.net/s/topic/a5C3l000000UQ46EAG/t113988 – Ansteuerung vieler 7-Segmentanzeigen (man kann ein ähnliches Problem bekommen, wenn man versucht, damit eine DCF77-Uhr zu bauen, die volle Datumsanzeige ermöglicht)
DCF77-Uhrenprojekte
- https://www.instructables.com/Arduino-VFD-Display-Clock-Tutorial-A-Guide-To-VFD-/ – mit Beschreibung und Reverse-Engineering von bestehenden Displays
- https://www.dg7xo.de/selbstbau/dcf77_radio_clock.html – mit 2x20 VFD-Display
- http://www.stefan-buchgeher.info/elektronik/dcf_uhr_cpld/dcf_uhr_cpld.html#Kap1 – mit LED 7-Segmentanzeigen auf Basis eines Complex Programmable Logic Device (CPLD)
- https://www.mikrocontroller.net/articles/DCF77-Funkwecker_mit_AVR – mit LED 7-Segmentanzeigen auf Basis eines ATmega8.
- https://www.mikrocontroller.net/topic/151260 – ein ähnliches Projekt mit Implementierung in Assembler (auch ATmega8) und incl. Diskussion.